24 июня 2021 года в 16:02
Ученые создали четвероногий марсоход
Швейцарские и немецкие ученые и конструкторы разрабатывают новую модель робота-марсохода Spacebock. Он передвигается на четырех ногах, что делает его более проходимым в условиях неровной и каменистой марсианской равнины.

Смотреть все фото в галерее

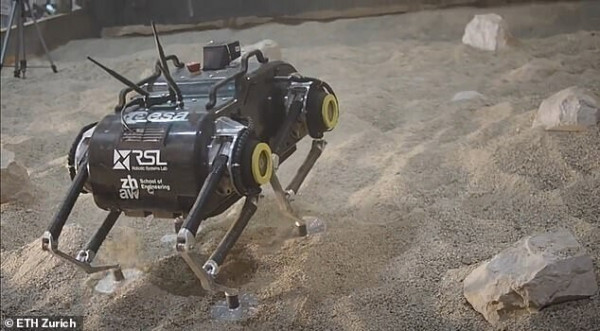
Небольшой робот по имени SpaceBok станет первой механической четвероногой машиной, которая пойдет по поверхности Марса. Другие марсоходы, работающие на Красной планете, такие как Perseverance и Curiosity, разработанные НАСА, обладают гигантскими колесами, которые ограничивают их возможности передвижения. Четыре ноги SpaceBok позволят ему аккуратно двигаться по пересеченной местности и, возможно, искать признаки жизни, которые в противном случае могли бы остаться незамеченными.
Первоначально робот был разработан для передвижения по Луне и был запрограммирован на прыжки, а не на ходьбу, но создатели SpaceBok переработали его, чтобы он мог быть использован на Марсе.
SpaceBok - это детище группы ученых из ETH Zurich в Швейцарии и Института Макса Планка в Германии, которые в 2018 году разработали его, чтобы имитировать движения антилопы-спрингбока. Теперь команда изменила ноги и походку робота, чтобы помочь ему противостоять более опасным ландшафтам Марса.
2021-06-22T08:30:55+03:00

SpaceBok - это детище группы ученых из ETH Zurich в Швейцарии и Института Макса Планка в Германии, которые в 2018 году разработали его, чтобы имитировать движения антилопы-спрингбока. Теперь команда изменила ноги и походку робота, чтобы помочь ему противостоять более опасным ландшафтам Марса.
В марсианской модификации разработчики отучили SpaceBok прыгать: прыжки были заменены стабильными движениями каждой ноги. "Мы хотели показать, что сегодня эти динамически работающие системы действительно могут ходить по марсианскому песку, - заявил в интервью робототехник ETH Zurich Хендрик Колвенбах. - У этой технологии большой потенциал для будущего".

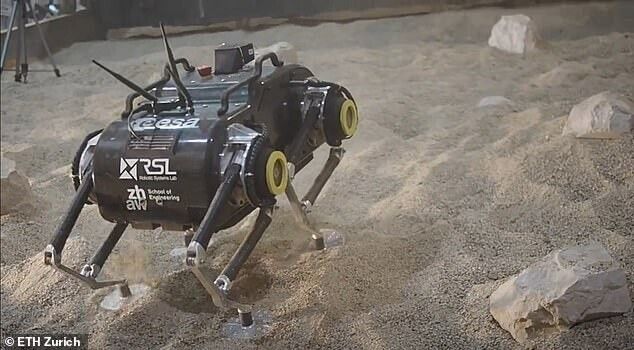
SpaceBok недавно прошел тестирование на большой площадке, похожей на песочницу, внутри лаборатории, заполненной камнями, имитирующими почву Марса. Робот демонстрировал различные варианты походки, тестировался с небольшими ступнями в форме копыт и с плоскими круглыми ступнями с шипами для большей устойчивости. Обе конструкции позволили SpaceBok устойчиво стоять на 25-градусном уклоне.

Исследователи также снабдили SpaceBok алгоритмом, который отслеживает потребление энергии и определяет наиболее эффективный путь в зависимости от мощности робота. Например, путешествуя в гору по смоделированному грунту Марса, робот начал двигаться зигзагообразно, вместо того, чтобы идти по прямому пути, - это потребовало бы больше энергии, чем было у SpaceBok на тот момент.

В своем докладе исследователи продемонстрировали, что SpaceBok способен подниматься по смоделированному марсианскому склону, не падая. Экспериментальная модель представляет новые методы для безопасных и энергоэффективных глобальных стратегий планирования доступа к сложной топографии Марса.
В настоящее время на Марсе работают марсоходы НАСА Perseverance и Curiosity, а также китайский марсоход "Чжуронг". Все три машины могут похвастаться массивными колесами как средством передвижения по пыльному ландшафту. Эти колеса ограничивают их способность исследовать определенные регионы и преодолевать препятствия.
"Роботы с ногами, возможно, не заменят колесных роботов в космических исследованиях, - говорит Найгард, - но они определенно могут внести ценный вклад и сыграть важную роль в исследованиях".
Небольшой робот по имени SpaceBok станет первой механической четвероногой машиной, которая пойдет по поверхности Марса. Другие марсоходы, работающие на Красной планете, такие как Perseverance и Curiosity, разработанные НАСА, обладают гигантскими колесами, которые ограничивают их возможности передвижения. Четыре ноги SpaceBok позволят ему аккуратно двигаться по пересеченной местности и, возможно, искать признаки жизни, которые в противном случае могли бы остаться незамеченными.
Первоначально робот был разработан для передвижения по Луне и был запрограммирован на прыжки, а не на ходьбу, но создатели SpaceBok переработали его, чтобы он мог быть использован на Марсе.
SpaceBok - это детище группы ученых из ETH Zurich в Швейцарии и Института Макса Планка в Германии, которые в 2018 году разработали его, чтобы имитировать движения антилопы-спрингбока. Теперь команда изменила ноги и походку робота, чтобы помочь ему противостоять более опасным ландшафтам Марса.
В марсианской модификации разработчики отучили SpaceBok прыгать: прыжки были заменены стабильными движениями каждой ноги. "Мы хотели показать, что сегодня эти динамически работающие системы действительно могут ходить по марсианскому песку, - заявил в интервью робототехник ETH Zurich Хендрик Колвенбах. - У этой технологии большой потенциал для будущего".
SpaceBok недавно прошел тестирование на большой площадке, похожей на песочницу, внутри лаборатории, заполненной камнями, имитирующими почву Марса. Робот демонстрировал различные варианты походки, тестировался с небольшими ступнями в форме копыт и с плоскими круглыми ступнями с шипами для большей устойчивости. Обе конструкции позволили SpaceBok устойчиво стоять на 25-градусном уклоне.
Исследователи также снабдили SpaceBok алгоритмом, который отслеживает потребление энергии и определяет наиболее эффективный путь в зависимости от мощности робота. Например, путешествуя в гору по смоделированному грунту Марса, робот начал двигаться зигзагообразно, вместо того, чтобы идти по прямому пути, - это потребовало бы больше энергии, чем было у SpaceBok на тот момент.
В своем докладе исследователи продемонстрировали, что SpaceBok способен подниматься по смоделированному марсианскому склону, не падая. Экспериментальная модель представляет новые методы для безопасных и энергоэффективных глобальных стратегий планирования доступа к сложной топографии Марса.
В настоящее время на Марсе работают марсоходы НАСА Perseverance и Curiosity, а также китайский марсоход "Чжуронг". Все три машины могут похвастаться массивными колесами как средством передвижения по пыльному ландшафту. Эти колеса ограничивают их способность исследовать определенные регионы и преодолевать препятствия.
"Роботы с ногами, возможно, не заменят колесных роботов в космических исследованиях, - говорит Найгард, - но они определенно могут внести ценный вклад и сыграть важную роль в исследованиях".

Смотреть все фото в галерее

Небольшой робот по имени SpaceBok станет первой механической четвероногой машиной, которая пойдет по поверхности Марса. Другие марсоходы, работающие на Красной планете, такие как Perseverance и Curiosity, разработанные НАСА, обладают гигантскими колесами, которые ограничивают их возможности передвижения. Четыре ноги SpaceBok позволят ему аккуратно двигаться по пересеченной местности и, возможно, искать признаки жизни, которые в противном случае могли бы остаться незамеченными.
Первоначально робот был разработан для передвижения по Луне и был запрограммирован на прыжки, а не на ходьбу, но создатели SpaceBok переработали его, чтобы он мог быть использован на Марсе.
SpaceBok - это детище группы ученых из ETH Zurich в Швейцарии и Института Макса Планка в Германии, которые в 2018 году разработали его, чтобы имитировать движения антилопы-спрингбока. Теперь команда изменила ноги и походку робота, чтобы помочь ему противостоять более опасным ландшафтам Марса.
2021-06-22T08:30:55+03:00
SpaceBok - это детище группы ученых из ETH Zurich в Швейцарии и Института Макса Планка в Германии, которые в 2018 году разработали его, чтобы имитировать движения антилопы-спрингбока. Теперь команда изменила ноги и походку робота, чтобы помочь ему противостоять более опасным ландшафтам Марса.
В марсианской модификации разработчики отучили SpaceBok прыгать: прыжки были заменены стабильными движениями каждой ноги. "Мы хотели показать, что сегодня эти динамически работающие системы действительно могут ходить по марсианскому песку, - заявил в интервью робототехник ETH Zurich Хендрик Колвенбах. - У этой технологии большой потенциал для будущего".

SpaceBok недавно прошел тестирование на большой площадке, похожей на песочницу, внутри лаборатории, заполненной камнями, имитирующими почву Марса. Робот демонстрировал различные варианты походки, тестировался с небольшими ступнями в форме копыт и с плоскими круглыми ступнями с шипами для большей устойчивости. Обе конструкции позволили SpaceBok устойчиво стоять на 25-градусном уклоне.

Исследователи также снабдили SpaceBok алгоритмом, который отслеживает потребление энергии и определяет наиболее эффективный путь в зависимости от мощности робота. Например, путешествуя в гору по смоделированному грунту Марса, робот начал двигаться зигзагообразно, вместо того, чтобы идти по прямому пути, - это потребовало бы больше энергии, чем было у SpaceBok на тот момент.

В своем докладе исследователи продемонстрировали, что SpaceBok способен подниматься по смоделированному марсианскому склону, не падая. Экспериментальная модель представляет новые методы для безопасных и энергоэффективных глобальных стратегий планирования доступа к сложной топографии Марса.
В настоящее время на Марсе работают марсоходы НАСА Perseverance и Curiosity, а также китайский марсоход "Чжуронг". Все три машины могут похвастаться массивными колесами как средством передвижения по пыльному ландшафту. Эти колеса ограничивают их способность исследовать определенные регионы и преодолевать препятствия.
"Роботы с ногами, возможно, не заменят колесных роботов в космических исследованиях, - говорит Найгард, - но они определенно могут внести ценный вклад и сыграть важную роль в исследованиях".
Небольшой робот по имени SpaceBok станет первой механической четвероногой машиной, которая пойдет по поверхности Марса. Другие марсоходы, работающие на Красной планете, такие как Perseverance и Curiosity, разработанные НАСА, обладают гигантскими колесами, которые ограничивают их возможности передвижения. Четыре ноги SpaceBok позволят ему аккуратно двигаться по пересеченной местности и, возможно, искать признаки жизни, которые в противном случае могли бы остаться незамеченными.
Первоначально робот был разработан для передвижения по Луне и был запрограммирован на прыжки, а не на ходьбу, но создатели SpaceBok переработали его, чтобы он мог быть использован на Марсе.
SpaceBok - это детище группы ученых из ETH Zurich в Швейцарии и Института Макса Планка в Германии, которые в 2018 году разработали его, чтобы имитировать движения антилопы-спрингбока. Теперь команда изменила ноги и походку робота, чтобы помочь ему противостоять более опасным ландшафтам Марса.
В марсианской модификации разработчики отучили SpaceBok прыгать: прыжки были заменены стабильными движениями каждой ноги. "Мы хотели показать, что сегодня эти динамически работающие системы действительно могут ходить по марсианскому песку, - заявил в интервью робототехник ETH Zurich Хендрик Колвенбах. - У этой технологии большой потенциал для будущего".
SpaceBok недавно прошел тестирование на большой площадке, похожей на песочницу, внутри лаборатории, заполненной камнями, имитирующими почву Марса. Робот демонстрировал различные варианты походки, тестировался с небольшими ступнями в форме копыт и с плоскими круглыми ступнями с шипами для большей устойчивости. Обе конструкции позволили SpaceBok устойчиво стоять на 25-градусном уклоне.
Исследователи также снабдили SpaceBok алгоритмом, который отслеживает потребление энергии и определяет наиболее эффективный путь в зависимости от мощности робота. Например, путешествуя в гору по смоделированному грунту Марса, робот начал двигаться зигзагообразно, вместо того, чтобы идти по прямому пути, - это потребовало бы больше энергии, чем было у SpaceBok на тот момент.
В своем докладе исследователи продемонстрировали, что SpaceBok способен подниматься по смоделированному марсианскому склону, не падая. Экспериментальная модель представляет новые методы для безопасных и энергоэффективных глобальных стратегий планирования доступа к сложной топографии Марса.
В настоящее время на Марсе работают марсоходы НАСА Perseverance и Curiosity, а также китайский марсоход "Чжуронг". Все три машины могут похвастаться массивными колесами как средством передвижения по пыльному ландшафту. Эти колеса ограничивают их способность исследовать определенные регионы и преодолевать препятствия.
"Роботы с ногами, возможно, не заменят колесных роботов в космических исследованиях, - говорит Найгард, - но они определенно могут внести ценный вклад и сыграть важную роль в исследованиях".
Чтобы оставить комментарий, необходимо авторизоваться:
Смотри также